
Glacier tongues are floating platforms of ice that can extend several kilometers into the sea and be hundreds of meters thick, thus creating a physical obstacle to local flow which influences circulation and mixing. This mechanical effect is similar to that of a peninsula or a headland with the exception that flow can pass under a glacier tongue. In addition, the difference between glacier heat and salt content compared to the surrounding ocean will influence thermohaline circulation and mixing. Upper ocean mixing in polar regions effects sea ice formation and biological productivity and is therefore linked to the climate system through changes in albedo and carbon cycling. Processes occurring at the local scale of a glacier tongue may have relevance to oceanographic processes on a much larger scale at the face of ice shelves that cover thousands of kilometers of Antarctica coastline and can be over 1000 m thick.
Scientists predict that the sea ice area around Antarctica will be reduced by as much as 33 per cent by 2100, accelerating the collapse of ice shelves and glacier tongues, so the need to understand the ocean’s role in these changes is critical.
The Antarctica 2010 Glacier Tongues and Ocean Mixing research project led by investigator Craig Stevens at the New Zealand National Institute for Water and Atmospheric Research, and including scientists from Canada, New Zealand, the U.S. and the U.K, will study the effect of ice shelves on ocean mixing. The project will investigate processes in the ice-covered waters of Antarctica at the Erebus Glacier Tongue (EGT), located at latitude 77˚ south. The EGT in McMurdo Sound is approximately 12 km long, 2.5 km wide, 300 m thick at the grounding line and tapers to 50 m thick at the tip. Water depths near the tip are approximately 400 m and the EGT is usually surrounded by both 6 m+ thick multi-year and 2 m thick first-year land-fast sea-ice.
Investigating oceanic processes requires first accessing the water below, and sea-ice presents a logistical challenge to oceanographic research, limiting access to individual locations where holes can be drilled through the ice. However, with the use of some advanced technology we are hoping to change that!
In addition to traditional oceanographic instruments that will collect depth profiles at precise locations over time, we will also utilize an Autonomous Underwater Vehicle (AUV) and a Remotely Operated Vehicle (ROV) to survey the ocean spatially. The AUV is an intelligent robot that is pre-programmed to dive under the ice and collect oceanographic data on a planned flight path, it is completely self-contained and operates without instruction from the surface once it is underway. The ROV however, is constantly linked to the surface with a cable or tether, and the human pilot at the surface maneuvers the ROV using a joystick and a video-feed. The AUV can collect data along transects over a large area, while the ROV can survey small regions that are otherwise difficult to access, such as along the submerged EGT side-wall.
The combined array of instruments will permit observation of ocean mixing across both time and space, providing a better understanding of the process at work around glacier tongues and ice shelves.
Recent Publications:
C. Stevens et al. 2010. Flow and mixing around a glacier tongue. Ocean Sci. Discuss., 7: 1439-1467. PDF
Related Publications:
Robinson, NJ., M. J. M. Williams, P. J. Barrett, and A. R. Pyne. Observations of flow and ice-ocean interaction beneath the McMurdo Ice Shelf, Antarctica. J. Geophys. Res., 115, C03025, doi:10.1029/2008JC005255.
Stevens, CL; Robinson, NJ; Williams, MJM; Haskell, TG. 2009. Observations of Turbulence Beneath Sea Ice in Southern McMurdo Sound, Antarctica. Ocean Science, 5, 435-445.
Mueller, D., L. Copland, A. Hamilton and D. Stern. 2008. Examining Arctic ice shelves prior to the 2008 breakup. Eos Trans. AGU 89: 500-501. [doi:10.1029/2008EO490002].
SCAR 2009. Scientific Committee on Antarctic Research (SCAR) Report: Antarctic Climate Change and the Environment. Scott Polar Research Institute, Cambridge, United Kingdom. 526pp.
Forrest, A.L., B.E. Laval, M.J. Doble, E Magnusson, and R. Yeo. (2008) AUV measurements of under-ice thermal structure. Oceans 2008 IEEE/MTS. Quebec City, PQ, Canada. 10 pages.
The Scientific Committee on Antarctic Research Standing Scientific Group on Physical Sciences. [www.antarctica.ac.uk/met/SCAR_ssg_ps/AGCS.htm].
Doble, M.J., P. Wadhams, A.L. Forrest, and B.E. Laval. AUV deployment through ice: two years of Arctic experience. Cold Regions Science and Technology. 56: 90-97.
Nicholls, K. W. et al. Measurements beneath an Antarctic ice shelf using an autonomous underwater vehicle. Geophys. Res. Lett. 33: L08612, doi: 10.1029/02006GL025998.
Hamilton, A., and S. Gagnon. Climate Change: Ellesmere Island Ice Shelves. Canadian Geographic Magazine [serial on the Internet]. 2008 Oct. [cited 2008 Sept 16]. Available from: http://www.canadiangeographic.ca/magazine/oct08/feature_grisefiord_cc3.asp.
Wadhams, P. and M.J. Doble 2008. Digital terrain mapping of the underside of sea ice from a small AUV. Geophys. Res. Lett., 35, L01501, doi:10.1029/2007GL031921.
© University of British Columbia 2010
Science
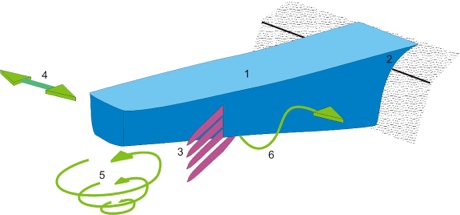
Sketch showing proposed physical oceanographic mixing processes. (1) the Erebus Glacier Tongue, (2) separating from the shore and driving (3) diffusive convective layering and (4) tides driving topographically-forced (5) horizontal and (6) vertical shear. Source: Stevens et al. unpublished
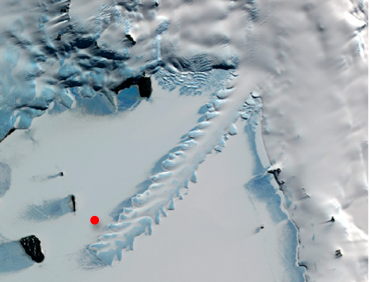
Satellite image of the Erebus Glacier Tongue extending into McMurdo Sound. The floating 50-300 m thick ice-tongue is 12 km long and 2.5 km wide and surrounded by sea ice. Sub-ice survey transects will extend from an ice-hole at the field camp (red dot). (Source: NASA Earth Observatory).

Credit: National Science Foundation
Aerial view of the tip of Erebus Glacier Tongue and the Dellbridge Islands, McMurdo Sound, Antarctica